| 来源:清华五道口国家金融研究院 编辑:管理员 时间:2023/9/12 |
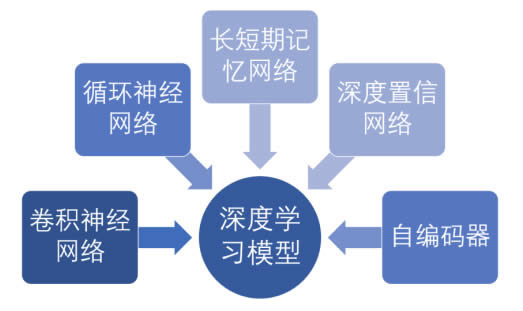
环境感知作为其他部分的基础,处于自动驾驶汽车与外界环境 信息交互的关键位置[7], 是实现自动驾驶的前提条件。环境感知指对于环境的场景理解能力,例如障碍物的类型、道路标志及标线、 行车车辆的检测、交通信息等数据的语言分类。定位是对感知结果的后处理,通过定位功能从而帮助车辆了解其相对于所处环境的位 置。环境感知包括: 可行驶路面检测、车道线检测、路缘检测、护 栏检测、行人检测、机动车检测、非机动车检测、路标检测、交通 标志检测、 交通信号灯检测等。对于如此复杂的路况检测,环境感 知技术是利用摄像机、激光雷达、毫米波雷达、超声波等车载传感 器,以及 V2X 和 5G 网络等获取汽车所处的交通环境信息和车辆状 态信息等多源信息[8] 深度学习技术可以让车辆准确感知和理解周围环境,从而带来 彻底的自动驾驶领域变革。该领域出现的关键技术[9],其中包括卷积神经网络(Convolutional Neural Networks,CNN)、循环神经网络 (Recurrent Neural Network,RNN)、长短期记忆网络(Long Short Term Memory ,LSTM)、深度置信网络(Deep Belief Network, DBN)和自编码器(Autoencoder, AE)等 5 种类型,如图所示。
深度学习中有4种类型的神经网络层,包括输入层、卷积层、池 化层和输出层。网络的结构可以 10 层甚至上百层,一般层数越多检 测精度越精准。 随着网络层数和节点数的增加,可以表达更细、更 多的识别物的特征, 为检测精度的提高奠定基础。 其中, 卷积层和 池化层是深度学习的核心处理层: 卷积层主要是用于负责物体特征 的提取, 池化层主要是负责采样。 自动驾驶技术中,CNN 被用于分析摄像头和激光雷达数据,以 便快速、准确地识别和分类出环境中的物体。 这些网络使用带注释 图像的大型数据集进行训练,能够学习数据中的复杂特征和模式。 基于 CNN 的自动驾驶系统的一个例子是 YOLO(You Only Look Once)算法,它能够高精度地实时识别和分类物体。另外,在自动 驾驶中,RNN 用于随时间分析传感器数据以预测未来事件和行为。 例如,基于 RNN 的系统可能会分析其他车辆的轨迹以预测它们的预 期动作或分析传感器数据以预测行人过马路的可能性。 为了确保自动驾驶汽车能够正确理解周围的环境并做出相应的 规划和决策,需要利用传感器获取大量的周围环境信息,这就是所 谓的环境感知。通过实时拍摄车辆周围的环境,采用计算机视觉 (Computer Vision,CV)技术对所拍摄图像进行分析,实现车辆周 围的车辆和行人检测以及交通标志识别等功能。摄像头的主要优点 在于其分辨率高、成本低。但在夜晚、雨雪雾霾等恶劣天气下,摄 像头的性能会迅速下降。此外摄像头所能观察的距离有限,不擅长 于远距离观察。毫米波雷达也是自动驾驶车辆常用的一种传感器, 毫米波雷达是指工作在毫米波段(波长1-10 mm ,频域30-300GHz) 的雷达,其基于飞行时间(Time of Flight,ToF)技术对目标物体进 行检测。毫米波雷达向外界连续发送毫米波信号,并接收目标返回 的信号,根据信号发出与接收之间的时间差确定目标与车辆之间的 距离。因此,毫米波雷达主要用于避免汽车与周围物体发生碰撞, 如盲点检测、避障辅助、泊车辅助、自适应巡航等。毫米波雷达的 抗干扰能力强,对降雨、沙尘、烟雾等离子的穿透能力要比激光和 红外强很多,可全天候工作。但其也具有信号衰减大、容易受到建 筑物、人体等的阻挡,传输距离较短,分辨率不高,难以成像等不 足。激光雷达也是通过 ToF 技术来确定目标位置与距离的。激光雷 达是通过发射激光束来实现对目标的探测,其探测精度和灵敏度更高,探测范围更广,但激光雷达更容易受到空气中雨雪雾霾等的干 扰,其高成本也是制约其应用的主要原因。自动驾驶环境感知通常 采用“弱感知+超强智能”和“强感知+强智能”两大技术路线。其 中“弱感知+超强智能”技术是指主要依赖摄像头与深度学习技术实 现环境感知,而不依赖于激光雷达。这种技术认为人类靠一双眼睛 就可以开车,那么车也可以靠摄像头来看清周围环境。如果超强智 能暂时难以达到,为实现自动驾驶,那就需要增强感知能力,这就 是所谓的“强感知+强智能”技术路线。相比“弱感知+超强智能” 技术路线,“强感知+强智能”技术路线的Z大特征就是增加了激光 雷达这个传感器,从而大幅提高感知能力。特斯拉采用“弱智能+超 强智能”技术路线,而谷歌 Waymo、百度 Apollo、Uber 等人工智能 企业、出行公司、传统车企都采用“强感知+强智能”技术路线。
|
| 信息推荐 |
| » 人工智能在自动驾驶汽车中的应用-帮助车辆实现对周围环境的实时监测 |
| 自动驾驶汽车通过摄像机、激光雷达、毫米波雷达、超声波等 车载传感器来感知周围的环境,依据所获取的信息来进行决策判断, 由适当的工作模型来制定相应的策略 |
| » 欧盟推出自动驾驶准入许可实现特定场景合规应用 |
| 《关于在智能网联车辆和出行相关应用程序中处理个人数据的指南》《数据治理法案》《全自动车辆自动驾驶系统(ADS) 型式认证的统一程序和技术规范》 |
| » 国际顶级公司在人工智能自动驾驶上的最新研发成果 |
| Waymo 在平均接管 两次间可行驶里程这个指标中排名第一,在测试里程中排名第二。 Waymo 的有效专利数也是常年领先,近三年增速降低,但仍排在前 三位 |
| » 人工智能在自动驾驶领域的市场情况 |
| 半导体技术的提升与成本的下降,电动化的不断普及加速了智能化,对安全性便捷性和高效出行的要求,自动驾驶将有效缓解交通拥堵,大大提高出行的效率 |
| » 基于人工智能的自动驾驶研发中关键性技术竞争点 |
| 算力、算法、数据采集以及用户数据是人工智能的发展依赖于四个基本要素,在自动驾驶市场中对应于 AI 芯片、决策软件、传感器、用户数据等 |
| » 人工智能在自动驾驶控制与执行中的应用-车辆的纵向,横向,驱动和制动控制 |
| RL 是自动驾驶控制和执行领域的一项关键技术,因为它可以让自动驾驶汽车学习并适应不断变化的道路状况,RL使AI系统能够就如何安全地通过交通和避免事故做出明智的决定 |
| » 人工智能在自动驾驶在决策与规划中的应用-选择多条安全路径和最优路径等步骤 |
| 深度学习可使车辆能够随着时间的推移学习和适应其环境,包括了解不同道路和交通模式的特征,以及适应道路上其他驾驶员的行为 |
| » 人工智能在自动驾驶精准定位中的应用-定位精度要求误差不超过10厘米 |
| 深度学习和机器学习技术是自动驾驶 SLAM 系统的核心组成部 分。它们允许车辆实时分析和处理大量数据,使其能够根据周围环 境做出智能和安全的决策 |